ACTUALIZACIONES TECNOLÓGICAS EN OFTALMOLOGÍA
Aplicaciones de la cirugía robótica en cirugía ocular
BARRETO GALEANO A1, NIEVA PASCUAL I1, NAVAS SANCHEZ A2, MATEOS VICENTE C1
Servicio de Oftalmología. Hospital Gregorio
Marañón. Madrid.
1 Licenciado en Medicina y Cirugía.
2 Licenciado en Medicina y Cirugía. Unidad de Retina y vítreo.
RESUMEN
El sistema quirúrgico Da Vinci en el ámbito oftalmológico podría aportar beneficios importantes en cuanto a la mejoría ergonómica, el filtrado del temblor y la distribución de la fuerza, con respecto a la cirugía ocular estándar. En este artículo se revisan las aplicaciones actuales en la cirugía ocular así como las ventajas y desventajas encontradas.
Palabras claves: Sistema quirúrgico Da Vinci, cirugía ocular.
PRESENTACIÓN
El sistema quirúrgico Da Vinci, desarrollado por Intuitive Surgical, es un robot quirúrgico diseñado para posibilitar un abordaje mínimamente invasivo en cirugías complejas. Recibe el nombre como homenaje al artista que construyó el primer robot.
Da Vinci es una plataforma robótica de cirugía asistida por ordenador, o sea, no opera de forma autónoma, sino que como es de suponer, necesita del control de un experto cirujano. El sistema, consiste básicamente en una consola ergonómica que incorpora una pantalla de visualización, desde donde el cirujano controla e interactúa de forma remota, mediante dos palancas y dos pedales de control, una serie de cuatro brazos electromecánicos articulados (figs. 1 y 2). Paralelamente, el sofisticado equipo digitaliza con enorme precisión los movimientos de la mano del cirujano en la consola que, en tiempo real, son reproducidos fielmente por las extremidades del autómata, corrigiendo temblores y llegando a lugares imposibles para la mano humana, gracias a su reducido diámetro.
El equipo está formado por tres componentes:
– Consola del cirujano: es el centro de mando del sistema Da Vinci. El cirujano se sitúa fuera del campo estéril y controla el endoscopio 3D y el instrumental Endowrist mediante dos controladores manuales y dos pedales. El sistema interpreta los movimientos del cirujano y los traduce a escala, a tiempo real y de forma precisa a los instrumentos.
– Carro del paciente: es el componente quirúrgico del sistema Da Vinci y su principal función es sostener los brazos para el instrumental y el brazo de la cámara endoscópica 3D. Este sistema utiliza la tecnología del centro de control que permite que la manipulación de los instrumentos y el endoscopio se realice únicamente en la zona elegida ejerciendo una mínima presión en los tejidos adyacentes.
El funcionamiento de los brazos robóticos del sistema Da Vinci es espectacular (figs. 1 y 2). Los dos primeros, que representan la mano izquierda y derecha del cirujano, sirven para manejar una serie de instrumentos quirúrgicos diseñados específicamente para esta máquina, denominados EndoWrist, mientras un tercero, que incorpora un endoscopio con dos sofisticadas mini-cámaras de vídeo de alta resolución tridimensional, permite la visualización interna de toda la operación; es como sumergir la cabeza dentro del cuerpo del paciente.
Si el cirujano necesita un mayor grado de detalle de la zona a intervenir, el sistema puede aumentar hasta en 20 veces la imagen original o incluso, resaltar de forma automática una determinada zona, todo ello, sin una perceptible pérdida de nitidez. Además, este tercer brazo, permite al cirujano cambiar, mover y rotar fácilmente el campo visual del endoscopio, lo que representa una enorme ventaja para el médico.
Por último, la cuarta extremidad de la máquina, se dedica a la realización de las tareas propias de un asistente de quirófano, separando tejidos durante la operación o suturando con enorme habilidad las heridas de las incisiones (fig. 1).

Fig. 1: Equipo quirúrgico Da Vinci.
El usuario del carro del paciente trabaja en el área estéril ayudando al cirujano con el intercambio de instrumentos y endoscopios.
– Carro de visualización: permite a todo el personal de quirófano seguir a tiempo real el acto quirúrgico (1) (fig. 2).

Fig. 2: Robot quirúrgico Da Vinci.
EndoWrist es el nombre que reciben los mini-instrumentos quirúrgicos fabricados específicamente para el sistema Da Vinci, los auténticos ejecutores prácticos de la intervención. Su cuidado e intuitivo diseño le permiten realizar una gama completa de movimientos con los que puede imitar a la perfección los movimientos de la muñeca del cirujano. Es más, gracias a sus siete tipos de movimiento y 90 grados de articulación, puede efectuar maniobras con una destreza superior a la mano humana. La línea EndoWrist, que actúan mediante un cable interno simulando el funcionamiento de los tendones humanos, incluye una gran variedad de herramientas como fórceps, agujas, tijeras, escalpelo, electrocauterio, etc., que permiten al equipo diseccionar, suturar o manipular los tejidos más delicados con suma precisión (1) (fig. 3).

Fig. 3: EndoWrist (micro instrumentos quirúrgicos).
Los instrumentos, que se fabrican en diámetros de 5 a 8 milímetros, necesitan de una sustitución periódica cada 10/12 intervenciones con el objeto de preservar su calidad.
El instrumental EndoWrist está diseñado para permitir al cirujano mantener su destreza y además, proporcionar un mayor rango de movimientos que el que posee la mano humana. Son instrumentos de uso múltiple.
Al proporcionar un mejor confort ergonómico, una mejor visualización del campo quirúrgico, una mayor precisión y destreza, permite realizar procedimientos complejos mediante abordajes mínimamente invasivos (2).
USO EN CIRUGÍA GENERAL
Inicialmente fue diseñado para mejorar la laparoscopia tradicional, en donde el cirujano de pie, usa instrumentos manuales, guiado por una cámara que proyecta la imagen a un monitor en 2D.
El sistema quirúrgico Da Vinci fue autorizado por la FDA para Cirugía General laparoscópica en 2000. Actualmente está aprobado su uso en procedimientos laparoscópicos a nivel del aparato digestivo, urológico, ginecológico, otorrinolaringológico y cardiovascular, pudiéndose realizar con éxito las siguientes intervenciones:
-
– Prostatectomía radical, pieloplastia, cistectomía, nefrectomía radical y parcial, reimplante ureteral y reconstrucción del suelo pélvico.
-
– Histerectomía simple y radical, miomectomía y sacrocolpopexia y anexectomías.
-
– Colecistectomía, funduplicatura de Nissen, miotomía de Heller, neoplasias de sigma y recto, cirugía bariátrica, bypass gástrico, esplenectomía y resección intestinal.
-
– Reparación de válvula mitral y tricúspide, cierre de comunicación interauricular, ablación cardíaca, bypass aorto coronaria y timectomías.
-
– Mediastinotomía, toracotomía, toracoscopia y mediastinoscopia.
-
– Resecciones en orofaringe, laringe, hipofaringe, suelo de la boca y cavidad oral
-
– Resección de tumores benignos y malignos clasificados como T1 y T2 (1). Ventajas: Permiten que el paciente tenga una mejor recuperación gracias a que las incisiones son mínimas, el enfermo requiere menos anestesia, se reducen las infecciones, la pérdida de sangre, el dolor postoperatorio, y las cicatrices son mucho menores, con lo cual se garantiza una recuperación más rápida y una menor estancia en el hospital. Por si todo ello fuera poco, pronto será habitual que estas máquinas puedan ser manejadas desde largas distancias (telecirugía), así que podremos ser atendidos por los mejores cirujanos del mundo en cada especialidad.
También en España el sistema Da Vinci cuenta con un enorme prestigio dentro de la comunidad de cirujanos a nivel mundial, pese a su coste, de aproximadamente 1,5 millones de euros.
USO EN CIRUGÍA OCULAR
La clásica microcirugía ocular es realizada usando microscopio quirúrgico, las estructuras oculares anteriores al vítreo son operadas bajo visión directa, mientras que otras estructuras de las regiones posteriores como son la retina y el vítreo se operan utilizando un sistema de lentes especiales (3).
La cirugía robótica es potencialmente un modo de cirugía ocular que aun no se ha establecido como procedimiento habitual.
El sistema Da Vinci proporciona visión estereoscópica tridimensional, característica fundamental para la cirugía ocular, con tres brazos robóticos esclavos que pueden ser equipados con instrumentos que tienen los grados de libertad de movimientos necesarios, similares a la de la articulación de la muñeca (4).
El operador obtiene una excelente imagen de profundidad y de las estructuras siendo una de las principales ventajas la capacidad de mejorar movimientos finos, muy precisos y minimización del temblor (2).
El cirujano mediante sus manos sostiene el control maestro a una confortable distancia y posición. Actualmente los microfórceps están graduados para suturas de hasta 7/0, por lo que nuevos materiales programados para suturas más finas serían aun más precisos (1).
El uso de cirugía ocular robótica no ha sido aun muy explorado. Los beneficios que podría aportar en cuanto a mejoría ergonómica, la escala del movimiento, el filtrado del temblor y la distribución de la fuerza son importantes con respecto a la cirugía ocular estándar; pero la integración de la misma tiene aun desventajas como el costo elevado del equipo, la necesidad del desarrollo de instrumentales específicos y la mejoría del sistema óptico, ya que aun no se ha conseguido igualar la calidad óptica del microscopio tradicional para los procedimientos intraoculares (5).
A día de hoy las publicaciones reflejan datos obtenidos de procedimientos realizados sobre todo en modelos porcinos, llevándose a cabo con éxito suturas corneales (figs. 4 y 5), queratoplastias penetrantes o pelado de membranas epiretinianas, pero aun no hay suficiente experiencia en humanos.
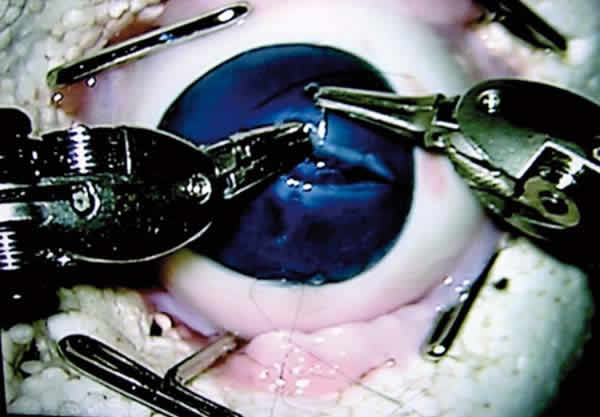
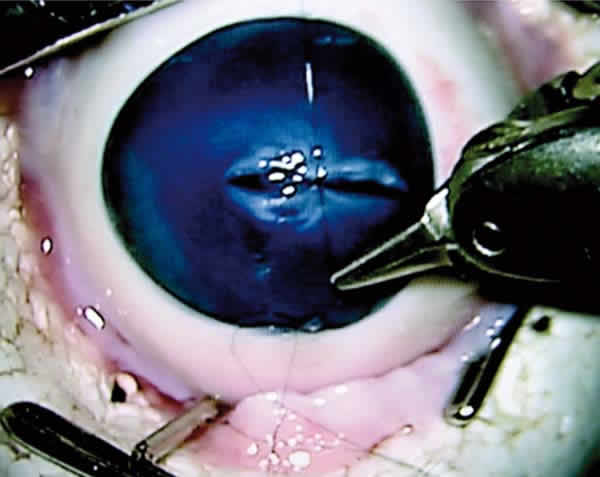
Figs. 4 y 5: Sutura corneal.
El sólido programa de investigación del Centro de Cirugía Robótica se centra en la búsqueda de seguridad y aplicaciones innovadoras de la tecnología robótica. La medición y los análisis de los resultados de la cirugía robótica es una ventaja frente a la cirugía abierta y además resulta beneficiosa para el paciente.
Los datos publicados apuntan a que las aplicaciones de la cirugía robótica ocular son prometedoras, y llevarán a futuros avances en la cirugía de cataratas, vítreo y retina.
BIBLIOGRAFÍA
-
Tirbas A, Mango C. Robotic ocular surgery. Br J Ophthalmol 2007; 91: 18-21.
-
Bourgel JL. Robotic microsurgery: Cornea transplantation. Br J Ophthalmol 2009; 93: 72-75.
-
Hubschman JP, Bourges JL, Choi W. The microhand a new concept of microforceps for ocular robotic surgery. Eye(Lond) 2010 feb 24; 364-367.
-
Bourges JL. Assesment of a Hexapod Surgycal System for robotic micro-macro manipulations in Ocular Surgery. Ophthalmic Res. 2010; 46: 25-30.
-
Bourla DH, Hubschman JP. Feasibility study of intraocular robotic surgery with the Da Vinci surgical system. Retina 2008; 28: 154-158.